English
English Español
Español Deutsch
Deutsch 日本語
日本語 Polska
Polska Français
Français 中國
中國 한국의
한국의 Українська
Українська Italiano
Italiano Nederlands
Nederlands Türkçe
Türkçe Português
Português Bahasa Indonesia
Bahasa Indonesia Русский
Русский हिंदी
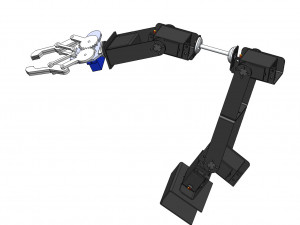
हिंदीrov gripper 3D 打印模型

- 可用的格式: Stereolithography: stl 799.47 kb
- 集合:No
- 以毫米为单位的宽度:237
- 以毫米为单位的高度:424
- 以毫米为单位的深度:41
- 打印准备:
- 3D扫描:No
- 成人内容:No
- PBR:No
- 日期:4717
- 日期: 2019-07-18
- 项目 ID:248663
- 评分:
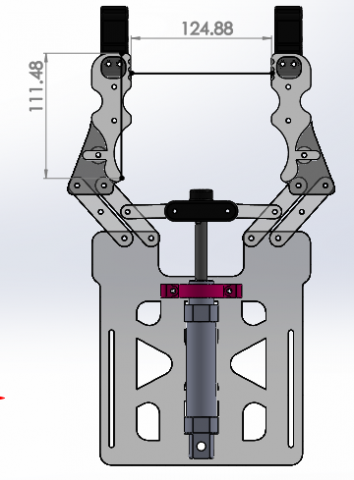
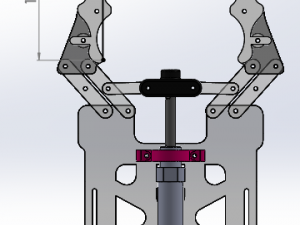
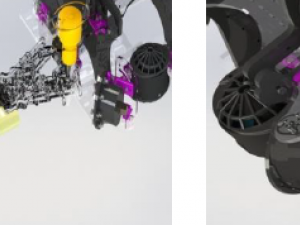
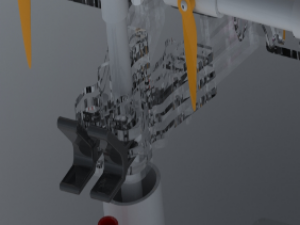
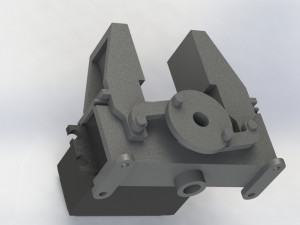
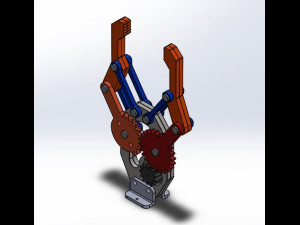
the gripper motion is based on the linear motion of the pneumatic piston rod (bore 25 mm and stroke 50mm). it depends on the parallel link mechanism to convert linear
motion of the cylinder to gripping action. the jaws of the gripper are designed to hold both circular and flat sections. the jaws are carefully designed to enable the pilot to hold the mission tools with ease. all files can be 3-d printed but i would recommend cutting the parts 2-d using cnc for lower cost except the parts named connecting link jr and piston fix jr, those must be 3-d printed.the jaws opening is 124 mm for the give type piston cylinder its code is cd85n25-50-b.
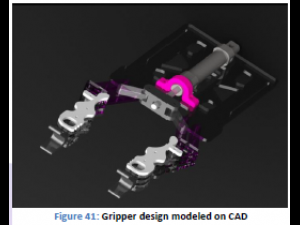
this link below shows the assembling of the parts of the gripper.
阅读更多motion of the cylinder to gripping action. the jaws of the gripper are designed to hold both circular and flat sections. the jaws are carefully designed to enable the pilot to hold the mission tools with ease. all files can be 3-d printed but i would recommend cutting the parts 2-d using cnc for lower cost except the parts named connecting link jr and piston fix jr, those must be 3-d printed.the jaws opening is 124 mm for the give type piston cylinder its code is cd85n25-50-b.
this link below shows the assembling of the parts of the gripper.
需要更多的格式吗?
如果你需要一个不同的格式,请打开一个新的支持票和为此请求。我们可以转换到 3D 模型: .stl, .c4d, .obj, .fbx, .ma/.mb, .3ds, .3dm, .dxf/.dwg, .max. .blend, .skp, .glb. 我们不转换 3d 场景 以及 .step、.iges、.stp、.sldprt 等格式。!
如果你需要一个不同的格式,请打开一个新的支持票和为此请求。我们可以转换到 3D 模型: .stl, .c4d, .obj, .fbx, .ma/.mb, .3ds, .3dm, .dxf/.dwg, .max. .blend, .skp, .glb. 我们不转换 3d 场景 以及 .step、.iges、.stp、.sldprt 等格式。!
下载 rov gripper 3D 打印模型 stl 从 abdullahessamabdullah
gripper pneumatic rov没有对这一项目的评论。
相关的项目 从 rov gripper
-40%
stl fbx iges sldprt step
RTT
Engineering
-40%
stl fbx iges sldprt step
RTT
Engineering
-40%
stl fbx iges sldprt step
RTT
Engineering